McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 13 potx

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 13 potx
... makes it 278 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices By-Pass Layouts The by-pass layout shown in Figures 1 1-9 and 1 1-1 0 relieves the switch of taking any force, ... Switches Figure 1 1-5 a Mechanical, Geared, and Cam Limit Switches Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 267 Figure 1 1-1 But...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 5 doc
... belts, plastic -and- cable chain, and all types of steel chain connect the input to the output mechanically by means of teeth just 71 76 Chapter 2 Indirect Power Transfer Devices Table 2-1 Timing Belts Timing ... especially in teleoperated vehicles. Figure 2-1 Flat, O-ring, and V-belt profiles and pulleys Figure 2-2 Variable Belt 88 Chapter 2 Indirect Power Transfer Devices p...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 6 ppsx
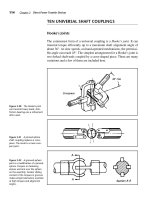
... is both com- pact and simple. 112 Chapter 3 Direct Power Transfer Devices Figure 3-9 Figure 3-1 0 Figure 3-1 1 Figure 3-1 2 Figure 3-1 3 102 Chapter 2 Indirect Power Transfer Devices HIGH-SPEED GEARHEADS ... Transfer Devices 113 Shaft couplings that include internal and external gears, balls, pins, and nonmetallic parts to transmit torque are shown here. Figure 3-1 4...
Ngày tải lên: 10/08/2014, 04:22
McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 7 pot
... from one-wheeled vehicles to eight- wheeled vehicles. It is divided into four sections: vehicles with one to three wheels and four-wheeled diamond layouts, four- and five-wheeled layouts, six-wheeled ... Power Transfer Devices 119 Figure 3-3 7 Machine-Tool splines have wide gaps between splines to permit accu- rate cylindrical grinding of the lands—for pre- cise positioning. Internal...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 9 ppt
... drive -and- brake steering sys- tem. Controlling the speed of each track directly adds a second major drive source, but gives fine steering and speed control. A second improvement to drive -and- brake ... These trucks (Figure 5-1 4) were called half-tracks. For a mobile robot, this is a less satisfactory layout since it Figure 5-1 3 Basic two-track layout Figure 5-1 4 The half-track...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 10 ppt
... there. Figures 7-8 and 7-9 show four- and six-legged walkers with three rotary-actuated joints in each leg. An eight-leg layout would have no less than 24 actuators. The four- and six-legged versions ... designing a walk- ing robot. Figure 7-1 4 Six-legged tripod-frame walker with single-DOF legs Chapter 7 Walkers 209 Figure 7-8 Independent leg walker, four legs, twelve DOF...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 11 ppsx
... in the case of sand, because it can’t be scaled. Sand is just sand no matter what size the vehi- cle is (except for tiny robots of course), and mud is still mud. Driving on sand or mud would ... vehicles’ suspension and locomotion systems are frequently quite simple. Figures 8-1 and 8-2 show two examples. Figure 8-1 Four-wheeled horizontal pipe crawler Chapter 8 Pipe Crawlers an...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 12 doc
... floor-standing industrial industrial robots today. Hydraulic-drive industrial robots are generally assigned to heavy-duty lifting applica- tions. Some electric and hydraulic industrial robots ... light-duty assembly or pick- and- place industrial robots that can be located on a bench. Some of these are programmed with electromechanical relays, and others are pro- grammed by setting mech...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 14 ppsx
... systems, 130 131 static stability minimums, 135 , 136 f three-wheeled layouts, 136 –140, 138 f, 139 f, 140f steering, 190, 191f two-wheeled layouts, 135 f 136 f steering, 190, 191f wheel size and spacing, 134 , ... systems, 130 131 static stability minimums, 135 , 136 f three-wheeled layouts, 136 –140, 138 f, 139 f, 140f steering, 190, 191f two-wheeled layouts, 135 f 136 f...
Ngày tải lên: 10/08/2014, 04:22

mcgraw hill robot mechanisms and mechanical devices illustrated 2003 docx
... heat trans- ferred tended to warp the substrate or delaminate it. The SDM laboratory has produced custom-made functional mechani- cal parts and has embedded prefabricated mechanical parts, electronic components, ... to achieve smooth, high-speed motion without overstressing the ser- Figure 1-6 Ballscrew-driven single-axis slide mechanism with- out position feedback sensors. Figure 1-7...
Ngày tải lên: 14/03/2014, 16:20