McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 5 doc

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 5 doc
... are Figure 1 -5 2 Exploded view of a rotary solenoid showing its princi- pal components. Figure 1 -5 3 Cutaway views of a rotary solenoid de-energized (a) and energized (b). When ener- gized, the ... the efficient con- version of electrical energy to mechanical motion. Rotary solenoids can provide well over 100 lb-in. (1 15 kgf-cm) of torque from a unit less than 2. 25 in. (57 mm) lon...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 12 doc
... floor-standing industrial industrial robots today. Hydraulic-drive industrial robots are generally assigned to heavy-duty lifting applica- tions. Some electric and hydraulic industrial robots ... light-duty assembly or pick- and- place industrial robots that can be located on a bench. Some of these are programmed with electromechanical relays, and others are pro- grammed by setting mech...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 6 ppsx
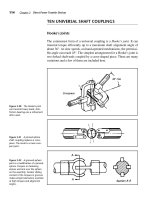
... is both com- pact and simple. 112 Chapter 3 Direct Power Transfer Devices Figure 3-9 Figure 3-1 0 Figure 3-1 1 Figure 3-1 2 Figure 3-1 3 102 Chapter 2 Indirect Power Transfer Devices HIGH-SPEED GEARHEADS ... Transfer Devices 113 Shaft couplings that include internal and external gears, balls, pins, and nonmetallic parts to transmit torque are shown here. Figure 3-1 4...
Ngày tải lên: 10/08/2014, 04:22
McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 7 pot
... from one-wheeled vehicles to eight- wheeled vehicles. It is divided into four sections: vehicles with one to three wheels and four-wheeled diamond layouts, four- and five-wheeled layouts, six-wheeled ... stop- ping the rotating part, usually the output shaft. Figures 3-4 4 through 3 -5 3 show several torque limiters, which are good examples of the wide vari- ety of methods available....
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 9 ppt
... Chapter 5 Tracked Vehicle Suspensions and Drivetrains Figure 5- 5 a–d Various track shapes to improve mobility and robustness Figure 5- 5 b Figure 5- 5 c Chapter 5 Tracked Vehicle Suspensions and Drivetrains ... for mobile robots. Figure 5- 6 (a–b) shows one layout for a variable geome- try track system. Many others are possible. Figure 5- 5 d Figure 5- 6 a–b Variable track s...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 10 ppt
... there. Figures 7-8 and 7-9 show four- and six-legged walkers with three rotary-actuated joints in each leg. An eight-leg layout would have no less than 24 actuators. The four- and six-legged versions ... actuators bi-directional, and, better than that, to have both bi-directional. The Rug Warrior educational robot uses two bi-directional motors—one at each wheel. This steering ge...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 11 ppsx
... nearly as high as the legs are long. Robotics researchers are working on small four- and six-wheel leg robots that use this concept with very good results. Figure 7-1 5 shows the basic concept. A variation of ... in the case of sand, because it can’t be scaled. Sand is just sand no matter what size the vehi- cle is (except for tiny robots of course), and mud is still mud. Driving on s...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 13 potx
... Switches Figure 1 1 -5 a Mechanical, Geared, and Cam Limit Switches Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices 267 Figure 1 1-1 Button Switch Figure 1 1-2 Lever Switch 288 ... makes it 278 Chapter 11 Proprioceptive and Environmental Sensing Mechanisms and Devices By-Pass Layouts The by-pass layout shown in Figures 1 1-9 and 1 1-1...
Ngày tải lên: 10/08/2014, 04:22

McGraw-Hill - Robot Mechanisms and Mechanical Devices Illustrated - 2003 Part 14 ppsx
... 134 one-wheeled layouts, 1 35 roller walkers, 214 six-wheeled layouts, 150 – 155 Alvis Stalwart, 152 with DOF joints, 153 rocker bogie suspension system, 153 – 155 , 154 f, 166 skid steering, 150 f– 152 f, 151 f spring ... (iRobot), 2 05 grass, 233 grippers (end-effectors) direct drive jaws, 252 – 253 f parallel jaws, 254 f– 255 f passive capture joint with three DOF, 256 – 257 f passive...
Ngày tải lên: 10/08/2014, 04:22

mcgraw hill robot mechanisms and mechanical devices illustrated 2003 docx
... 49 Tachometers 51 Linear Variable Differential Transformers (LVDTs) 53 Linear Velocity Transducers (LVTs) 55 Angular Displacement Transducers (ATDs) 55 Inductosyns 57 Laser Interferometers 57 Precision ... Freedom 256 Contents vii Flat Belts 73 O-Ring Belts 73 V-Belts 73 Timing Belts 75 Smoother Drive Without Gears 76 Plastic -and- Cable Chain 77 Chain 79 Ladder Chain 80 Roller...
Ngày tải lên: 14/03/2014, 16:20