Automated Continuous Process Control Part 10 ppt

Wiley automated continuous process control (227p)
... with this manual process control. First, the job requires that the operator look frequently at the temperature to take 1 c01.qxd 7/3/2003 8:19 PM Page 1 Automated Continuous Process Control. Carlos ... therefore the controlled variable must follow the set point. Servo control refers to control systems designed for this purpose. Regulatory control is far more common than servo...
Ngày tải lên: 15/05/2014, 11:04

Torque Control Part 10 ppt
... suggests that Δ T can also be controlled by controlling the level of V s . Thus both Δ T and Δ Ψ s can be controlled to minimum when the average stator voltage level is controlled to follow the ... limitations In HDTC the motor torque control is achieved through two hysteresis controllers, one for stator flux magnitude error control and the other for torque error control. The sel...
Ngày tải lên: 20/06/2014, 07:20

Process Management Part 10 pptx
... Politechnico Di Milano view of the process Integration of BPM Systems 217 Fig. 10. The UoG view of the shared process server side, through the Java API for XML processing (JAXP 2008). JAXP ... local BPM suites. In order for the process to be shared by their partners from other organisations, we design and implemented a PIM system which can capture runnin process instances a...
Ngày tải lên: 20/06/2014, 11:20

Stochastic Control Part 10 ppt
... the form Stochastic Control3 82 I S is the unit row of dimension S; 2 1 1 100 0 0 010 0 0 010 0 0 010 0 010 S S S S E 2 1 0 00 01 0 00 010 0 0 01 S S S S , ... optimum control for nonlinear stochastic structures in the multistructural systems and methods of its solution 383 I S is the unit row of dimension S; 2 1 1...
Ngày tải lên: 21/06/2014, 05:20

Mechatronic Systems, Simulation, Modeling and Control Part 10 ppt
... Simulation and Real-Time Control: from Simulink to Industrial Applications, 2002 IEEE International Symposium on Computer Aided Control System Design Proceedings, pp .104 -109 Kishida, K.; Koga, ... make the execution of the iterative design process of control system efficiently. In particular, this paper proposed the method which is based on the RT control framework, transformat...
Ngày tải lên: 21/06/2014, 07:20

Essentials of Process Control phần 10 ppt
... different controller settings do 100 0 nc=1,3 time=O. tprint=O. tplot=O. np=O do IO ntank=I,3 10 t(ntank)=1.50. c controller calculation to get Ql c All control signals are in 4-20 milliamperes 100 ... -j,=tldeabndead-j, tldead(l)=tl c********************** if(time.lt.tstop)go fo 100 c change controller settings 100 0 continue c store data for plotting ltsing M-ITLAB do I10...
Ngày tải lên: 24/07/2014, 07:21
Nuclear Power Control, Reliability and Human Factors Part 10 ppt
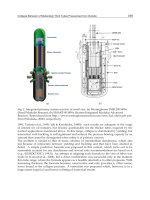
... CNIITMASH using round bar specimens manufactured of 10GN2MFA-A and 10GN2MFA-S steels at a strain rate 1,4 .10 -7 s -1 . Resistance of 10GN2MFA-A Low Alloy Steel to Stress Corrosion Cracking ... two 268 Nuclear Power – Control, Reliability and Human Factors Nuclear Power – Control, Reliability and Human Factors 276 steam generators were made of doubly vacuum treated 10GN2MFA st...
Ngày tải lên: 19/06/2014, 11:20

Organic Light Emitting Diode Material Process and Devices Part 10 ppt
... 16x10 -3 14 12 10 8 6 4 2 0 |I D | 1/2 [A 1/2 ] -10 -5 0 5 10 V GS [V] 10 -12 10 -11 10 -10 10 -9 10 -8 10 -7 10 -6 10 -5 10 -4 |I D | [A] 'After parylene' = 3.21x10 -1 ... approach. 16x10 -3 14 12 10 8 6 4 2 0 |I D | 1/2 [A 1/2 ] -10 -5 0 5 10 V GS [V] 10 -13 10 -11 10 -9 10 -7 10 -5 |I D | [A] 'Before parylene'...
Ngày tải lên: 19/06/2014, 21:20

PID Control Implementation and Tuning Part 10 pptx
... Based Tuning Algorithm for MPID Control 175 0 2 4 6 8 10 12 x 10 4 0 30 60 90 120 150 Vibration control gain Kvc Criterion function Fig. 8. Relation between vibration control gain and criterion function. By ... optimum gain. PID Control, Implementation and Tuning174 0 2 4 6 8 10 12 x 10 4 0 30 60 90 120 150 Vibration control gain Kvc Criterion function Fig. 8. Relation betwee...
Ngày tải lên: 20/06/2014, 04:20

Adaptive Control 2011 Part 10 ppt
... PID control for comparison: In order to compare the control performance of the proposed control strategy with the PID controller , we choose 11 2 0 ( ) 22 13 t vt e edt e=− + − ∫ Adaptive control ... , pp. 101 2 -101 8. Erenturk, K. (2008). Nonlinear two-mass system control with sliding-mode and optimised proportional and integral derivative controller combined with a grey est...
Ngày tải lên: 21/06/2014, 19:20